Программа
NIP_TOMO.
Чрезвычайно
острой в сейсморазведке остается проблема пересчета скоростей ОГТ в
интервальные скорости. Еще более актуальной является задача получения сетки
мгновенных скоростей, необходимой для глубинной миграции.
Ериком
Дувеником разработан и реализован
алгоритм томографического расчета сетки скоростей V(x,z) и V(x,y,z) по параметрам CRS.
Литература: “Tomographic
determination of seismic velocity models with kinematic wavefield attributes”,
DISSERTATION von Dipl.-Geophys. Eric Duveneck,
Bremen.
eric.duveneck@gpi.uni-karlsruhe.de
Н.Голярчуком предложен алгоритм пересчета результатов погоризонтного анализа Vогт в параметры CRS.
Этот
алгоритм реализован в пункте меню программы CDPS Processing->HORSP-TOMO.
В
диалоговом окне Tomography следует указать
параметры:
Path for Files - Путь, где размещены все входные и выходные файлы.
Dimension - Размерность
задачи:
1-D inversion - Одномерная
обратная задача.
2-D inversion - Двумерная обратная задача.
3-D inversion - Трехмерная обратная задача.
1-D modelling - Одномерная прямая задача.
2-D modelling - Двумерная прямая задача.
3-D modelling - Трехмерная
прямая задача.
В
группе "File Names":
Input data file name - Главный входной файл для программы.
При инверсии является
выходным файлом процедуры CDPS Processing->HORSP-TOMO. Содержит четыре параметра: Т, M_h, p_xi и xi.
При моделировании
содержит скоростную модель среды (интервальные скорости).
Обязательный параметр.
Output Data File Name - Выходной файл параметров CRS в
текстовом формате.
Knot sequence in x-direction - Файл узловых точек по оси Х.
Knot sequence in y-direction - Файл узловых точек по оси Y.
Knot sequence in z-direction - Файл узловых точек по оси Z.
Input Velocities - Файл, содержащий априорную информацию о скоростях.
Output Velocities - Уточненный файл априорной информации в результате
решения.
Initial velocity model - Начальная скоростная модель.
Final velocity model - Окончательная
скоростная модель в формате сейсмического файла SU.
Преобразование файла в
формат SPS-PC осуществляется утилитой Seismic Unix.
Epsilon XX Model - Веса для регуляризации решения
по x.
Epsilon YY Model - Веса для регуляризации
решения по y.
В
группе Parameters:
v0 - Начальное значение приповерхностной скорости.
grad0 - Начальный градиент скорости.
v(z) = v0 + grad0 * (z - zknots(0))
ds - (Delta
zknots)/20 i- длина шага
интегрирования по Z,
epsilonxx - вес для регуляризации (минимизация 2-й производной
по x от v),
epsilonyy - вес для регуляризации (минимизация 2-й производной
по y от v),
epsilonzz - вес для регуляризации (минимизация 2-й производной
по z от v),
epsilon - 0.0001*(epsilonxx+epsilonzz)
вес для регуляризации (минимизация v),
niteration - максимальное количество итераций.
maxcond – максимально
допустимое решение в LSQR
sigT - допустимая погрешность измерения времени (в 10^-3
сек)
sigM - допустимая погрешность измерения M (iв 10^-9s/(m*m))
maxh - максимальное половинное смещение, которое будет
использоваться для усреднения производных скорости (в м)
sigp - допустимая ошибка для горизонтальной медленности (в
10^-6 сек/иетр)
sigxi - допустимая ошибка для положения поверхности (в м)
sigv -
допустимая ошибка для априорной скорости
(в м / с)
sigvq - допустимый (обратный) вес для минимизации первой
производной скорости в касательном направлении локального отражателя
0: без минимизации первых производных
sigPxix -допустимая ошибка для горизонтальной медленности в x (в 10 ^ -6 с / м))
sigPxiy -
допустимая ошибка для горизонтальной
медленности по y (в 10 ^ -6 с / м)
sigXix - допустимая ошибка для положения поверхности x (в м)
sigXiy - допустимая ошибка для положения поверхности y (в м)
Все
эти параметры могут быть заданы и сохранены в файле задании с расширением JOB.
Задание
запускается кнопкой Start. На экране
появляется диалоговое окно Tomography Progress,
в котором отображается прохождение задания. Кнопкой Interrupt можно прервать задание в любой момент.
-------------------------------------------------------------------------------------------------------------------------------
Приведем несколько примеров успешного практического применения
программы томографии NIP TOMO.
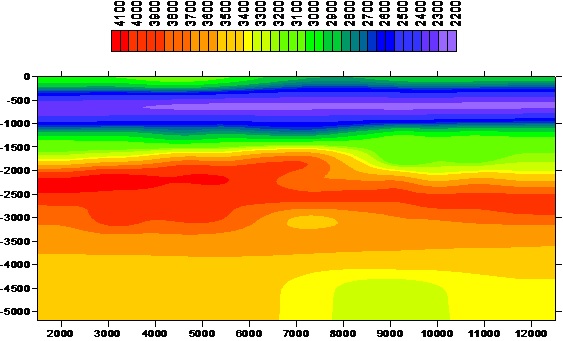
Рис.
1. Пеляткинское ГКМ. Разрез интервальных (пластовых) скоростей по ПР 01.
Глубинный масштаб. Получен в результате томографических расчетов программой NIP_TOMO 2-D.

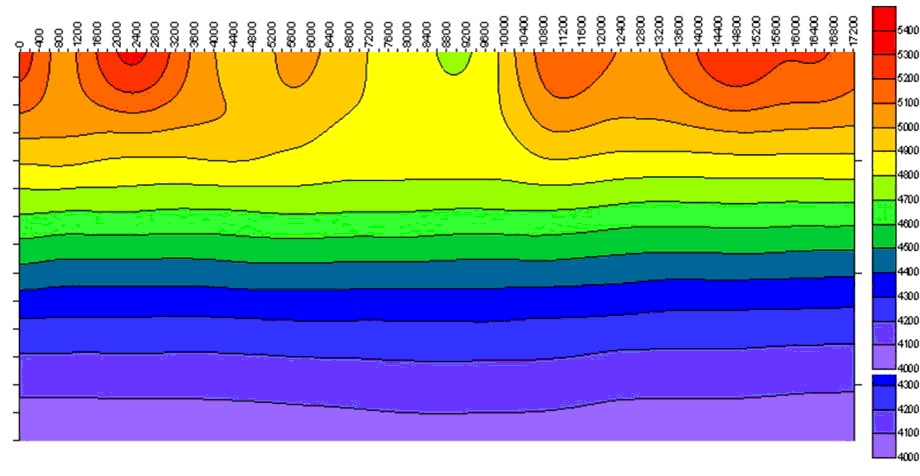
Рис.2.
Непско-Ботуобинская антеклиза. Разрез интервальных скоростей по профилю 04,
полученный NIP-томографией 2-D.
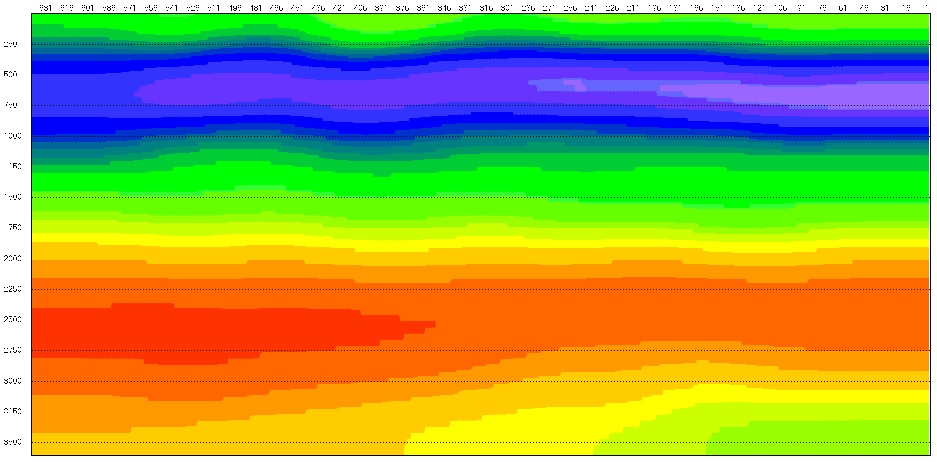
Рис.3.
Результат томографической инверсии NIPTOMO 3-D. CrossLine 312. Этот куб получен с заданием Pel_3D.JOB в папке DATAZ\DEMO_3D.
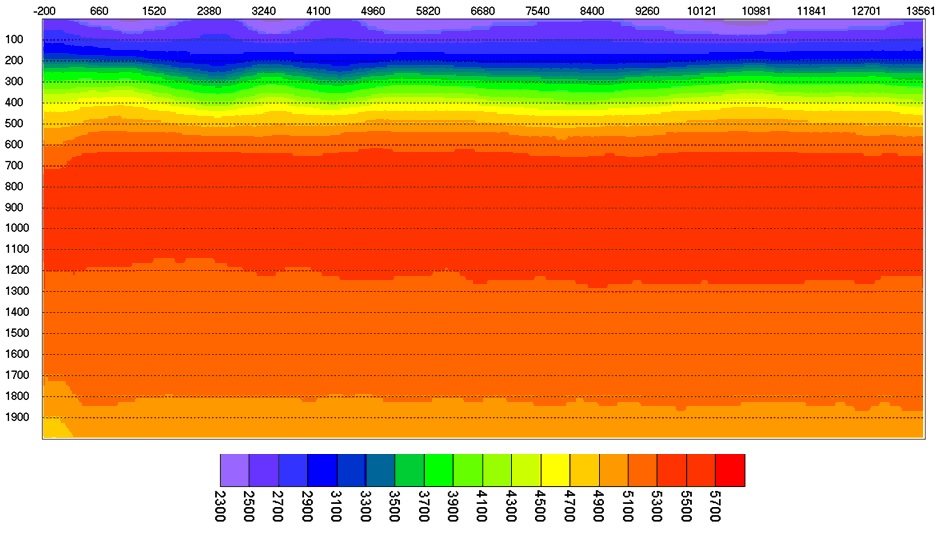
Рис.4.
Результат томографической инверсии NIPTOMO 2-D. Якутия. НБА. Мин.V=2300 Макс.V=5800
м/сек. Этот разрез получен с заданием Kurung.JOB в папке DATAZ\DEMO_2D.
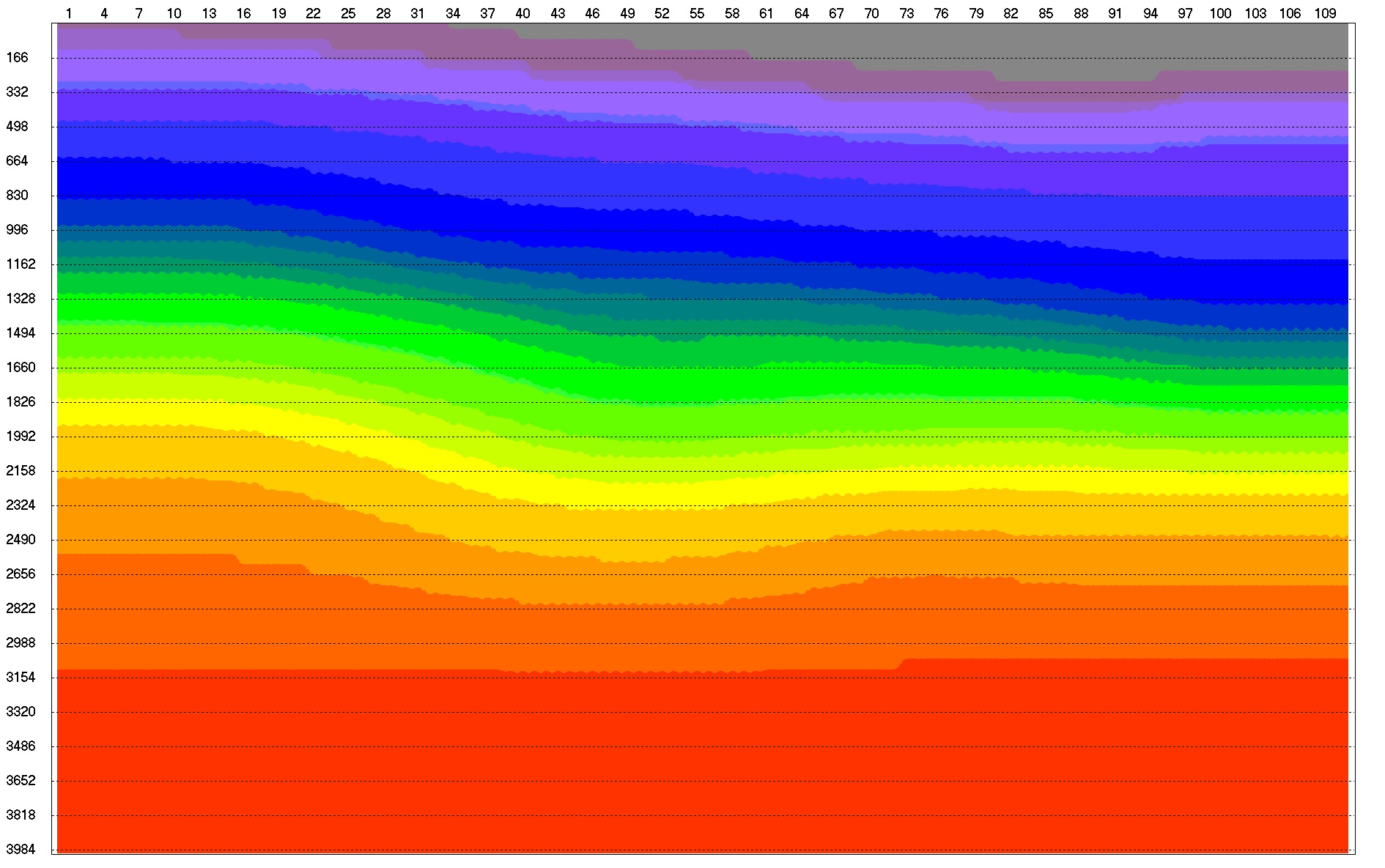
Рис.5.
Результат томографической инверсии NIPTOMO 3-D. Тестоые данные. InLine 111. Этот куб получен с
заданием Test_tomo_3D.JOB в папке DATAZ\DEMO_3D.
См. также:
Приведем также инструкцию-комментарий в оригинальной программе Эрика
Дувеника.
NIPTOMO - tomographic velocity model estimation
on a
B-splined model using CRS-Stack attributes
USAGE:
niptomo dimension= input= output=
zknots=
REQUIRED
PARAMETERS:
dimension= -int- Dimension of the problem:
1 for 1-D inversion
2 for 2-D inversion
3 for 3-D inversion
-1 for 1-D
modelling
-2 for 2-D modelling
-3 for 3-D modelling
-----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 1-D MODELLING:
input= -char[]- Input data file
name
[z]=m, z positive downward
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name
OPTIONAL PARAMETERS FOR 1-D
MODELLING:
output= -char[]- =\"output.dat\" Output data
filename
(final
parameters)
[T]=10^-3s, [M]=10^-9s/m^2, [z]=m
endmodel= -char[]- =\"endmodel.dat\" Final velocity model
file name
(densely sampled array, ASCII) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float- =0
starting vel. gradient, [grad0]=1/s
v(z) = v0 + grad0 * (z - zknots(0))
(only correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
-----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 1-D
INVERSION:
input= -char[]- Input data file
name
[t]=10^-3s, [M]=10^-9s/m^2
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name
OPTIONAL PARAMETERS FOR 1-D
INVERSION:
output= -char[]- =\"output.dat\" Output data
filename
(final parameters)
[T]=10^-3s, [M]=10^-9s/m^2, [z]=m
endmodel= -char[]- =\"endmodel.dat\" Final velocity model
file name
(densely sampled array, ASCII) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float-
=0 starting vel. gradient,
[grad0]=1/s
v(z) = v0 + grad0 * (z - zknots(0))
(only correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
epsilonzz= -float- =0.001 weight for
regularization
(minimization of 2nd z-derivative of v)
epsilon= -float- =0.0001*(epsilonxx+epsilonzz)
weight for
regularization (minimization of of v)
niteration= -int- =15
maximum number of
iterations
maxcond= -float- =100000.0 maximum condition
number for SVD truncation \n"
sigT= -float- =1
assumed error for time measurement (in 10^-3 s)
sigM= -float- =1
assumed error for measurements of M (in 10^-9s/(m*m)) \n"
-----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 2-D
MODELLING:
input= -char[]- Input data file
name
[x]=m, [z]=m, [theta]=degrees, z positive downward
xknots= -char[]- Knot sequence (for model description
in
x-direction, in m) file name
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name
OPTIONAL PARAMETERS FOR 2-D
MODELLING:
output= -char[]- =\"output.dat\" Output data
filename
(final parameters)
[T]=10^-3s, [M_h]=10^-9s/m^2, [p_xi]=10^-6 s/m,
[xi]=m, [x]=m, [z]=m, [theta]=degrees
endmodel= -char[]- =\"endmodel.su\" Final velocity model
file name
(densely sampled array, seismic un*x) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float-
=0 starting vel. gradient,
[grad0]=1/s
v(z) = v0 + grad0 * (z - zknots(0))
(only correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
hmax= -float-
=0.0 maximum half offset to be used for
\n"
averaging velocity derivatives (in m)
-----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 2-D
INVERSION:
input= -char[]- Input data file
name
[T]=10^-3s, [M_h]=10^-9s/m^2, [p_xi]=10^-6 s/m, [xi]=m
xknots= -char[]- Knot sequence (for model description
in
x-direction, in m) file name
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name
OPTIONAL PARAMETERS FOR 2-D
INVERSION:
output= -char[]- =\"output.dat\" Output data
filename
(final parameters)
[T]=10^-3s, [M_h]=10^-9s/m^2, [p_xi]=10^-6 s/m, [xi]=m, \n"
[x]=m, [z]=m, [theta]=degrees
vinput= -char[]- File containing a
priori velocity information: \n"
x z v(x,z), where [x]=[z]=m, [v]=m/s \n"
voutput= -char[]- =\"voutput.dat\" Name of output
file, containing \n"
the a priori velocity information together
with the \n"
corresponding obtained values: x z v(x,z) v_out(x,z), \n"
where [x]=[z]=m, [v]=[v_out]=m/s \n"
endmodel= -char[]- =\"endmodel.su\" Final velocity model
file name
(densely sampled array, seismic un*x) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float-
=0 starting vel. gradient,
[grad0]=1/s
v(z) = v0 + grad0 * (z -
zknots(0))
(only correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
hmax= -float- =0.0
maximum half offset to be used for \n"
averaging velocity derivatives (in m)
epsilonzz= -float- =0.001 weight for
regularization
(minimization of 2nd z-derivative of v)
epsilonxx= -float- =epsilonzz weight for
regularization
(minimization of 2nd x-derivative of v)
epsilon= -float- =0.0001*(epsilonxx+epsilonzz)
weight for
regularization
(minimization of of
v)
epsilonxxmodel= -char[]- Spatially varying weights for epsilonxx regularization
\n"
(B-spline coefficient values (1 - 100), default: 1) \n"
epsilonzzmodel= -char[]- Spatially varying weights for epsilonzz regularization
\n"
(B-spline coefficient values (1 - 100), default: 1) \n"
niteration= -int- =15
maximum number of
iterations
maxcond= -float- =10000.0 maximum condition
number in LSQR
sigT= -float- =1
assumed error for time measurement (in 10^-3 s)
sigM= -float- =1
assumed error for measurements of M (in 10^-9s/(m*m)) \n"
sigp= -float- =2
assumed error for horizontal slowness (in 10^-6 s/m)
sigxi= -float- =1 assumed
error for surface position (in m)
sigv= -float- =1
assumed error for a priori velocity (in m/s)
sigvq= -float- =0
assumed (inverse) weight for minimization of first
derivative of velocity in local reflector tangent direction \n"
0: no minimization of first derivatives
-----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 3-D
MODELLING:
input= -char[]- Input data file
name
[azimuth]=degrees, [x]=m, [y]=m, [z]=m,
[ex]=10^-3,[ey]=10^-3; z positive downward \n"
xknots= -char[]- Knot sequence (for model description
in
x-direction, in m) file name
yknots= -char[]- Knot
sequence (for model description in
y-direction, in m) file
name
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name \n"
OPTIONAL PARAMETERS FOR 3-D
MODELLING:
output= -char[]- =\"output.dat\" Output data
filename
(final parameters)
[T]=10^-3s,
[M_azimuth]=10^-9s/m^2 [Pxix]=10^-6s/m,
[Pxiy]=10^-6s/m, [Xix]=m, [Xiy]=m, [azimuth]=degrees, \n"
[x]=m,
[y]=m, [z]=m, [ex]=10^-3,[ey]=10^-3;
(M_azimuth =
d^2T/dh_azimuth^2
!!!)
endmodel= -char[]- =\"endmodel.su\" Final velocity model
file name \n"
(densely sampled array, seismic un*x) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in
m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float-
=0 starting vel. gradient,
[grad0]=1/s
v(z) = v0 + grad0 * (z - zknots(0))
(only correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
hmax= -float-
=0.0 maximum half offset to be used for
averaging velocity derivatives (in m)
----------------------------------------------------------------------------
REQUIRED PARAMETERS FOR 3-D
INVERSION:
input= -char[]- Input data file
name
[T]=10^-3s, [M_azimuth]=10^-9s/m^2 [Pxix]=10^-6s/m,
[Pxiy]=10^-6s/m, [Xix]=m, [Xiy]=m, [azimuth]=degrees \n"
xknots= -char[]- Knot sequence (for model description
in
x-direction, in m) file name
yknots= -char[]- Knot sequence (for model description
in
y-direction, in m) file
name
zknots= -char[]- Knot sequence (for model description
in
z-direction, in m, positive downward) file name \n"
OPTIONAL PARAMETERS FOR 3-D
INVERSION:
output= -char[]- =\"output.dat\" Output data
filename
(final parameters)
[T]=10^-3s, [M_azimuth]=10^-9s/m^2 [Pxix]=10^-6s/m,
[Pxiy]=10^-6s/m,
[Xix]=m, [Xiy]=m, [azimuth]=degrees, \n"
[x]=m,
[y]=m, [z]=m, [ex]=10^-3,[ey]=10^-3;
(M_azimuth
= d^2T/dh_azimuth^2
!!!)
vinput= -char[]- File containing a priori velocity
information: \n"
x
y z v(x,y,z), where [x]=[y]=[z]=m, [v]=m/s \n"
voutput=
-char[]- =\"voutput.dat\" Name of output file, containing
\n"
the a priori velocity information together with the \n"
corresponding obtained values: x y z v(x,y,z) v_out(x,y,z),
\n"
where [x]=[y]=[z]=m, [v]=[v_out]=m/s \n"
endmodel= -char[]- =\"endmodel.su\" Final velocity model
file name
(densely sampled array, seismic un*x) [v]=m/s
startmodel= -char[]- Initial velocity model file
name
(B-spline coefficient values in m/s)
v0= -float-
=1500 starting velocity,
[v0]=m/s
grad0= -float-
=0 starting vel. gradient, [grad0]=1/s
v(z) = v0 + grad0 * (z - zknots(0))
(only
correct if knots are equally spaced in z) \n"
ds= -float- =(Delta
zknots)/20 integration step length, [ds]=m \n"
hmax= -float-
=0.0 maximum half offset to be used for
\n"
averaging
velocity derivatives (in m)
epsilonzz= -float- =0.001 weight for
regularization
(minimization of 2nd z-derivative of
v)
epsilonxx= -float- =epsilonzz weight for
regularization
(minimization of 2nd x-derivative of v)
epsilonyy= -float- =epsilonzz weight for regularization
(minimization of 2nd y-derivative of v)
epsilon= -float- =0.0001*(epsilonxx+epsilonzz)
weight for
regularization (minimization of of v)
epsilonxxmodel= -char[]- Spatially varying weights for epsilonxx regularization
\n"
(B-spline
coefficient values (1 - 100), default: 1) 1-D array
epsilonyymodel= -char[]- Spatially varying weights for epsilonyy regularization
\n"
(B-spline coefficient values (1 - 100), default: 1) 1-D array
niteration= -int- =15
maximum number of
iterations
maxcond= -float- =10000.0 maximum condition
number in LSQR
sigT= -float- =1
assumed error for time measurement (in 10^-3 s)
sigM= -float- =1
assumed error for measurements of M (in 10^-9s/(m*m)) \n"
sigPxix= -float- =2 assumed error for
horizontal slowness in x (in 10^-6 s/m)
sigPxiy= -float- =2 assumed error for
horizontal slowness in y (in 10^-6 s/m)
sigXix= -float- =1 assumed
error for surface position x (in m)
sigXiy= -float- =1 assumed
error for surface position y (in m)
sigv= -float- =1
assumed error for a priori velocity (in m/s)
sigvq= -float- =0
assumed (inverse) weight for minimization of first
derivative of velocity in local reflector tangent direction \n"
0: no minimization of first derivatives
----------------------------------------------------------------------------------
All one-dimensional arrays have to be given as row
vectors.
The final velocity model B-spline coefficient values (in
m/s)
are written into
\"_endmodel.dat_\".
AUTHOR:
Eric
Duveneck
eric.duveneck@gpi.uni-karlsruhe.de